Agents
Agents
Agent = Architecture (Hardware) + Program (Software)
Environment difference between agent and environment: having a goal
Sensors (input) to percieve
Actuators (output) for actions
Agent function program on the architecture (hardware) to produce .
percept histories / sequences actions
Important aspects
exploration get new data about the world, experiment
learning from experience, successful / failed actions
autonomy extend initial knowledge by experience
Rationality
Being rational does not mean being:
omniscient (knowing everything) percepts may lack relevant information
clairvoyant (seeing into the future) predictions are not always accurate
successful (ideal outcome)
Rational agent
Chooses action that maximizes utility (measured with performance / sueccess measure) for any percept sequence.
Decisions based on evidence:
- percept history
- built-in knowledge of the environment - ie. fundamental knowledge laws like physics
P EAS
Task description of Agents. ie: Autonomous car
Performance measure safety, destination, profits, legality, comfort, . . .
Environment streets/freeways, traffic, pedestrians, weather, . . .
Actuators steering, accelerator, brake, horn, speaker/display, . . .
Sensors video, accelerometers, gauges, engine sensors, keyboard, GPS, . . .
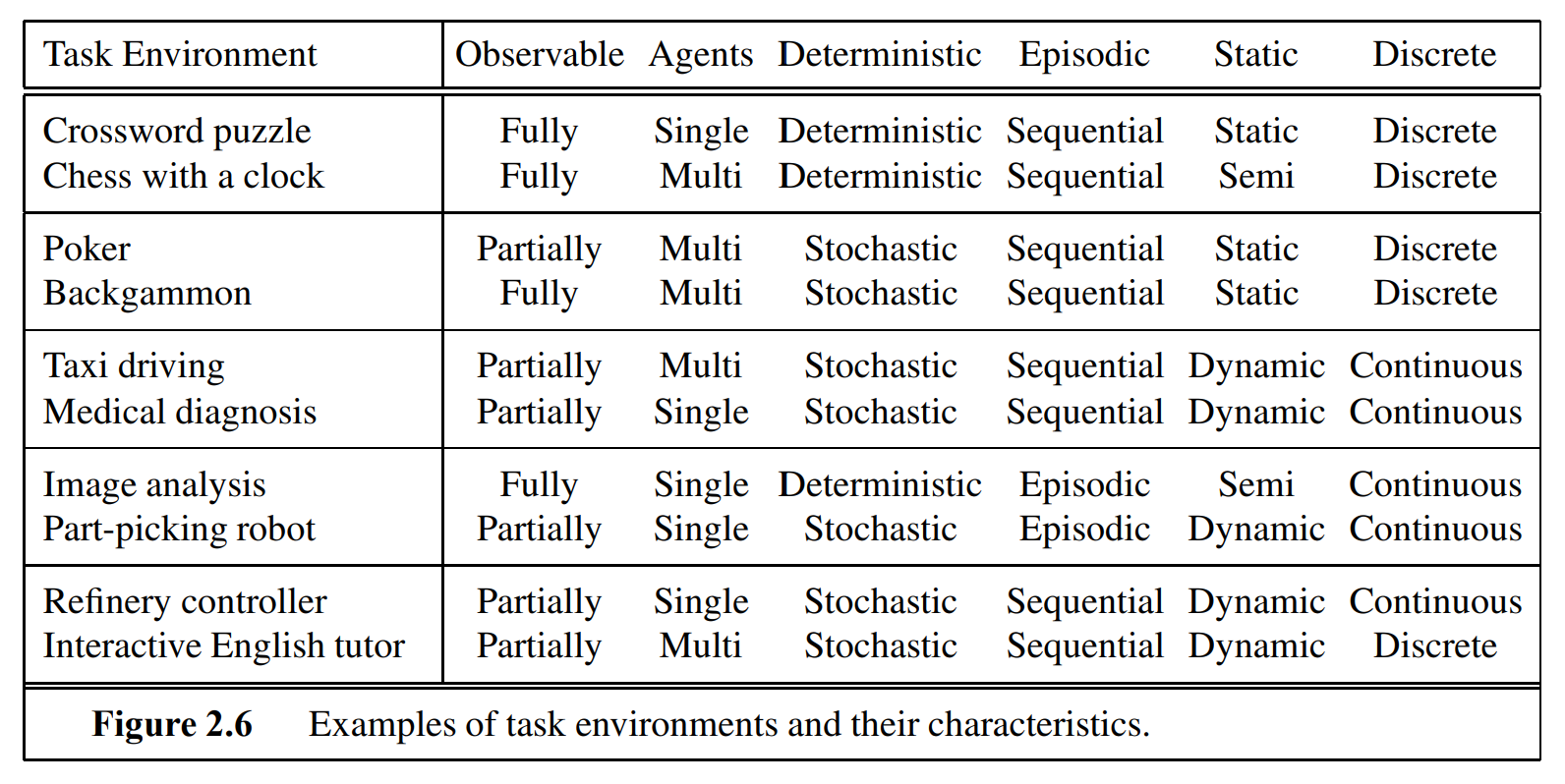
Environment Types
fully observable vs. partly observable
whether sensors can detect all relevant properties
single-agent vs. multi-agent
single agent, or multiple with cooperation, competition
deterministic vs. stochastic
whether the next state can be determined by current state + the performed action or is fully independent and can't be foreseen (multiple possible following states) - and we know the probabilities
episodic vs. sequential
Episodic: the choice of action only depends on the current episode - percept history divided into independent episodes.
Sequential: storing entire history (accessing memories lowers performance)
static vs. dynamic vs. semi-dynamic
Static: world does not change during the reasoning / processing time of the agent (waits for agents response)
Semi-dynamic: environment is static, but performance score decreases while processing time.
discrete vs. continuous
property values of the world
known vs. unknown
state of knowledge about the "laws of physics" of the environment
Examples
Agent Types
Sorted by capabilities / generality. All these can be turned into learning agents later.
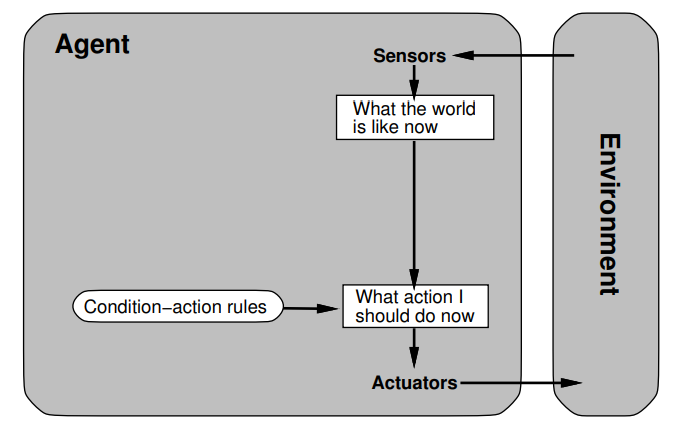
1. S imple reflex agents
- No memory (percept sequences), no internal states
- Only suitable for very specific tasks
-
Possible non-termination
Example: the door could be stuck or not openable
if closed(door) {open_door}
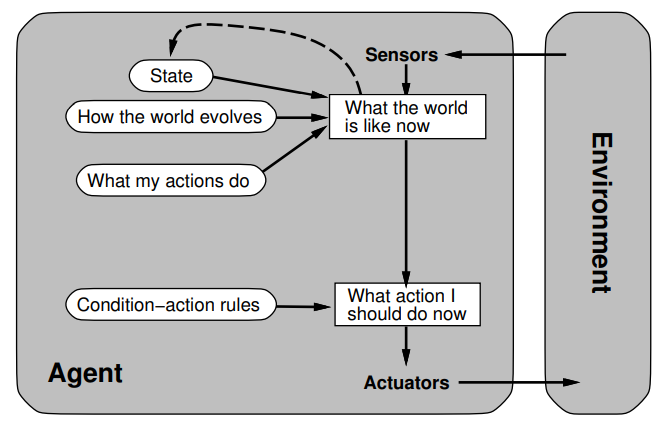
2. M odel-based reflex agent
Add on: internal state, model of environment and changes in it, ability to deal with uncertainty
- memory
, maintaining/update world state
UPDATE-STATE(state, latest_action, percept, model)
- can reason about unobservable parts
- has implicit goals
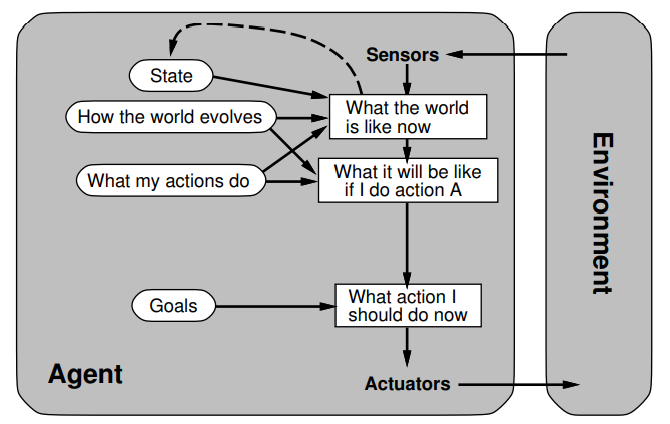
3. G oal-based agents
Add on: explicit goals , ability to plan into the future, model outcomes for predictions
- model the world , goals, actions and their effects explicitly
- more flexible, better maintainability
- Search and planning of actions to achieve a goal
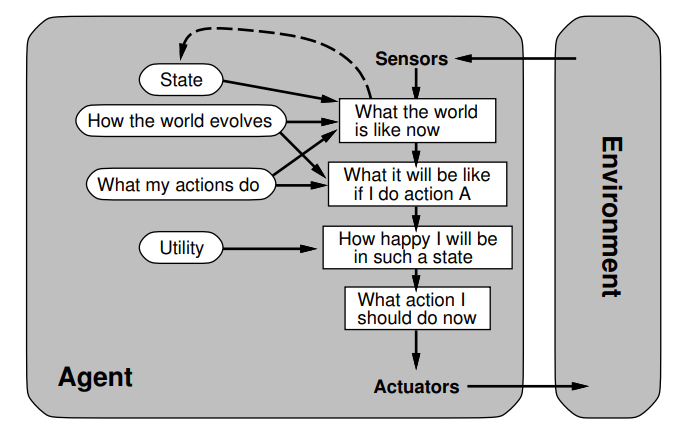
4. U tility-based agents
Add on: take happiness into account (current state) → Humans are utility-based agents
- assess goals with a utility function (maximizing happiness, concept from micro-economics)
- resolve conflicting goals - goals are weighted differently, the aim is to optimize a set of values
- use expected utility for decision making
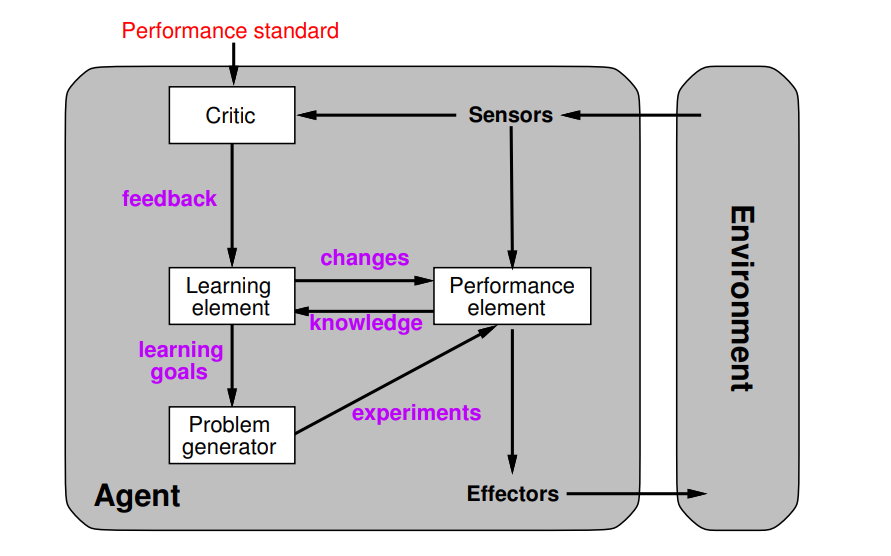
5. Learning agent
All the previous agents can be turned to learning agents
Able to learn the underlying functions of utility based agent.
Agents able to improve themselves by studying their own experiences.