Turingmaschinen
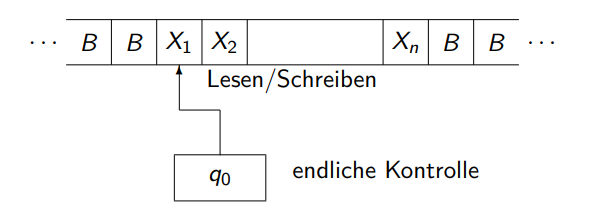
Turingmaschine ohne Arbeitsband
Zustände
Anfangszustand
Endzustände
Eingabesymbole
Symbole im Eingabewort (bevor es bearbeitet wurde).
Ansonsten ist das Verhalten undefiniert.
Bandsymbole
Symbole im Eingabewort + die zum Überschreiben, zB.
Übergangsfunktion
Wenn deterministisch DTM:
(max. 1 Element aus der Zielmenge)
Wenn nicht deterministisch NTM:
Was die Maschine tut:
Am Anfang ist der Kopf an der linkest möglichen Zelle.
Das Band ist links und rechts unendlich und mit Blanks gefüllt.
Basierend auf Zustand, Eingabe aus Band
- Wechsel Zustand
- Schreibe in Zelle
- Bewege Kopf
Unterschiede zwischen Turingmaschinen
Alle Varianten von Turingmaschinen sind gleich mächtig.
Es gibt zu jeder NTM eine DTM.
DTM können dazu dienen Funktionen zu berechnen wenn man das Band als Input und als Output sieht.
NTM können dazu dienen Wörter zu erzeugen indem man mit einem leeren Band anfängt.
Akzeptanz von Sprachen
Konfiguration
Alternative Darstellung
aktuelle Position vom Kopf (ließt Element rechts davon)
Bandsymbole / Abschnitt des Bandes wo nicht unendlich viele Blanks sind.
Akzeptierte Sprache
Deterministische Turingmaschine
Sprache wird von akzeptiert, wenn ein Endzustand erreicht wird:
Nicht-Deterministische Turingmaschine
Sprache wird von akzeptiert, wenn es möglich ist einen Endzustand zu erreichen.
Die Turingmaschine hält immer an, wenn sie einen Endzustand erreicht:
Endzustand mit erreichen bzw Wort akzeptieren Anhalten
Anhalten
Das Anhalten bei einem Endzustand ist die Abbildung:
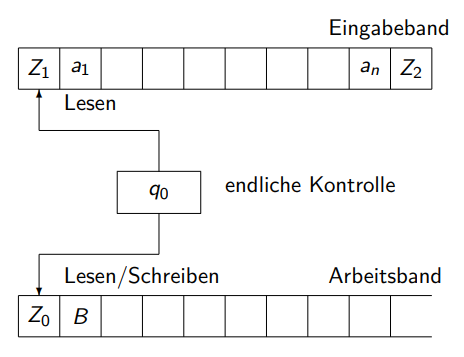
Turingmaschine mit Arbeitsband
Zustände
Anfangszustand
Endzustände
Eingabeband Symbole(nur lesen)
Symbole im Eingabewort sein können
Arbeitsband Symbole(lesen, schreiben)
Symbole im Eingabewort + die zum Schreiben wie
Übergangsfunktion
Wenn deterministisch DTM: (max. 1 Element aus der Zielmenge)
Zustand
Eingabeband
Arbeitsband
Position auf Eingabeband
Position auf Arbeitsband
Wenn nicht deterministisch NTM:
Bregenzungssymbole
Begrenzung Arbeitsband links
Begrenzung Eingabeband
Eingeschränkte Varianten
Normalform von DTM
Nur 1 Endzustand
Arbeitsband nach Ausführung und Akzeptanz leer
Letzter Übergang:
wobeibeliebiger Zustand
Linear beschränkter Automat LBA
= EA + beschränkter RAM (Arbeitsband)
Arbeitsband darf max. linear so viel Platz beanspruchen wie Eingabewort.
Kellerautomat KA (Pushdown automaton)
= EA + Stack
Nie nach links in Eingabeband:
Leseschreibkopf darf links davon nur Nicht-Blank-Symbole haben, rechts davon nur Blank-Symbole.
Akzeptierte Sprache
Zwei Möglichkeiten zu definieren
- In Endzustand
- Stack ist leer
Endlicher Automat EA
Nützt Arbeitsband nicht
Alternativerweise - auch zugleich Kellerautomat (mit unbenutztem Stack)
zu interpretieren als
zu interpretieren als