perceptron hard threshhold
g(x)={10 if x≥0 otherwise
sigmoid perceptron logistic function
g(x)=1+e−x1
3. Explain overfitting and ways to avoid it
Overfitting
The learn-algorithms will use any pattern they find in the examples even if they are not correlated.
Then the algorithm fits itself to the training examples and does not generalize well.
↑
likelyhood of overfitting if
↑
hypothesis space,
↑
number of inputs
↓
likelyhood of overfitting if
↑
examples.
To combat overfitting we therefore must:
use more training examples
reduce the hypothesis space size and the number of irrelevant inputs
Combating overfitting: in decision trees
Decision tree pruning
Combats overfitting, eliminates nodes that are not clearly relevant after tree got generated.
How do we detect nodes that test an irrelevant attribute?
Imagine being at a node with
pk
positive and
nk
negative examples, if the attribute is irrelevant we would expect it to split the examples into subsets that have roughly the
same proportion of positive examples as the whole set.
Now we know what amount of gain is insufficient, but what information gain is suffucient for splitting on a particular attribute? →
statistical
significance test
.
4. Explain the activation function, define 2 of them and sketch them out
Determine a threshhold, that makes the neuron fire if it is reached.
We use:
step function / hard limiter
linear function / treshold function
sigmoid function
5. Define consistency
Every consistent heuristic is also admissible. Consistency is stricter than admissibility.
Implies that
f
-value is
non-decreasing on every path
.
For every node
n
and its successor
n′
:
h(n)≤c(n,a,n′)+h(n′)
This is a form of the general triangle inequality.
f
is then non-decreasing along every path:
f(n′)=g(n′)+h(n′)=g(n)+c(n,a,n′)+h(n′)
f(n′)=g(n)+c(n,a,n′)+h(n′)≥g(n)+h(n)=f(n)(because of consistency)
f(n′)≥f(n)
6. Explain rational agents
Being rational does not mean being:
omniscient (knowing everything) percepts may lack relevant information
clairvoyant (seeing into the future) predictions are not always accurate
successful (ideal outcome)
Rational agent
Chooses action that maximizes utility (measured with performance / success measure) for any percept sequence.
Decisions based on evidence:
percept history
built-in knowledge of the environment -
ie. fundamental knowledge laws like physics
7. STRIPS vs. ADL
STRIPS
only positive literals in states
closed-world-assumption: unmentioned literals are false
Effect
P∧¬Q
means add
P
and delete
Q
only ground atoms in goals
Effects are conjunctions
No support for equality or types
ADL
positive and negative literals in states
open-world-assumption: unmentioned literals are unknown
Effect
P∧¬Q
means add
P
and
¬Q
delete
Q
and
¬P
goals contain
∃
quantor
goals allow conjunction and disjunction
conditional effects are allowed:
P:E
means
E
is only an effect if
P
is satisfied
Add on: take happiness into account (current state)
→ Humans are utility-based agents
assess goals with a
utility function
(maximizing happiness, concept from micro-economics)
resolve conflicting goals
- goals are weighted differently, the aim is to optimize a set of values
use expected utility for decision making
10. Constraint graph
Constraint graph
Can only be used for binary CSPs (only have binary constraints)
11. CSP heuristics for backtracking search
Variable ordering: fail first
Minimum remaining (legal) values MRV
degree heuristic - (used as a tie breaker), variable that occurs the most often in constraints
Value ordering: fail last
least-constraining-value - a value that rules out the fewest choices for the neighbouring variables in the constraint graph.
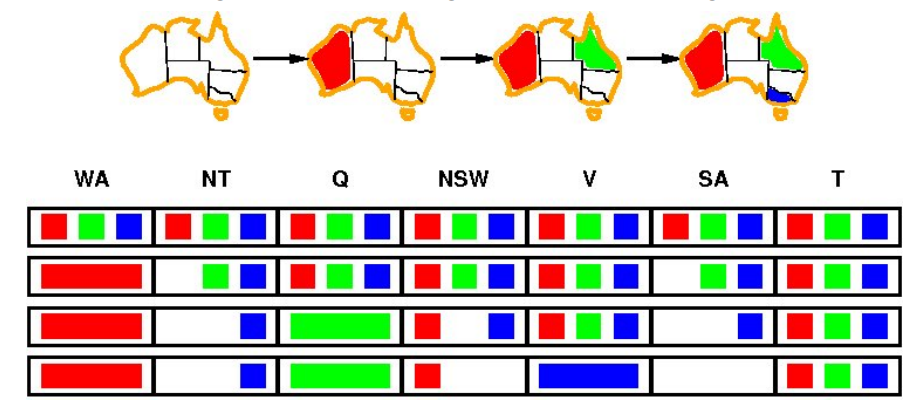
12. Forward checking
Forward checking
During search: Adapt domains of all nodes, connected to the value of this one (in constraint graph).
Forward checking does not provide early detection for all inconsistencies:
It only checks arc consistency for the currently chosen node and its neighbours.
NT and SA cannot both be blue!
Constraint Propagation
Propagating the meaning of a constraint on one variable onto other variables.
The simplest form:
Arc (= binary constraint) Consistency
between nodes in a constraint graph.
Two connected nodes
X,Y
are consistent iff for every value
x
of
X
there is some allowed value
y
of
Y
.
13. Explain the POP algorithm
Defines execution order of plan by searching in the space of partial-order plans.
Returns a
consistent plan
: without cycles in the ordering constraints and conflicts in the casual links.
Initiating empty plan
only contains the actions:
Start
no preconditions, effect has all literals, all preconditions are open, no casual links
Finish
has no effects, no open preconditions
ordering constraint:
Start≺Finish
no casual links
Searching
2.1 successor function: repeatedly choosing next possible state.
Chooses an open precondition
p
of action
B
and generates a successor plan (subtree) for every consistent way of choosing an action
A
that achieves
p
.
2.2 enforce consistency by defining new casual links in the plan:
A⟶pB,A≺B
IfAis new:Start≺A≺Finish
2.3 resolve conflicts
add
(B≺C)∧(C≺A)
2.4 goal test
because only consistent plans are generated - just check if preconditions are open.
If goal not reached, add successor states
14. Explain all types of state space search algorithms
Totally ordered plan searches
Variants:
progression planing: initial state
→
goal
regression planing: initial state
←
goal
(possible because of declarative representation of PDDL and strips)
Partial-order Planning
Order is not specified: can place to actions into a plan without specifying which one comes first.